Vous n'êtes pas identifié(e).
Pages 1
Bonjour à tous,
Projet: Création d'un Drone sans pilote: le SanPilot.
Les Fils de fer suivants sont Èquipés avec les fichiers .cfg et .air du Bell-206.
La modélisation
Alors voila ce qui bloque:
Tout ce passe très bien avec les avions!
aicraft 
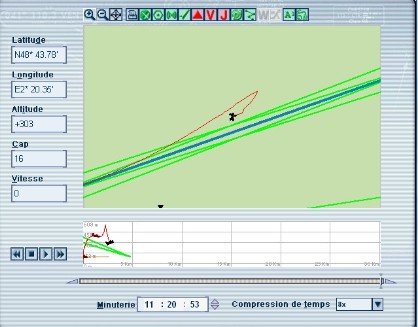
Décollage avec trés peu de gaz, l'helico décole, petite inclinaison vers l'avant, il avance,
mais au bout de quelques secondes il dévie ‡ gauche, monte ,descend, oscille de droite ‡ gauche, puis c'est le crash!
SanPilot 
Le Bell-206 fait la méme chose!
bell
J'ai mème acheté un joystick:"THRUSTMASTER-T-FLIGHT STICK X" car le précédent a beaucoup de jeu dans le manche!
Rien ne change.
Application de la modif proposée par « laup » sur le fichier.cfg de la montgolfière.
//Moments of Inertia
empty_weight_pitch_MOI = 320000000 //moment d'inertie autour de l'axe lateral-tangage
empty_weight_roll_MOI = 320000000 //moment d'inertie autour de l'axe lateral-roulis
empty_weight_yaw_MOI = 480000000 //moment d'inertie autour de l'axe lateral-lacet
empty_weight_coupled_MOI = 4800000 //moment d'inertie combiné autour des axes de roulis et lacet.
Le SanPilot ne réagit presque pas aux commandes! mais il est stable comme la montgolfière.
Plusieurs essais de valeur différente sont donc nécessaires, si vous avez une idée, je suis pret à tester.
A bientot, enfin si dieu le permet! 
+ Bienheureux les fêlés … car ils laissent passer la lumière ! 
De Philip Geluck: "Etre vieux, c'est etre jeune plus longtemps que les autres!" (à méditer!)
Hors ligne
Pages 1