Vous n'êtes pas identifié(e).
Merci à tous pour vos commentaires
@GUIBRU : heureusement, l'immat ne conditionne pas la zone de vol ! Si tu fais un tour sur Airliners, tu verras des Duke immatriculés aux Etats-Unis, en Italie, Espagne, Allemagne, etc.
Comme lui par exemple (Florence, Italie, pas de blessé) 

Bonjour à tous
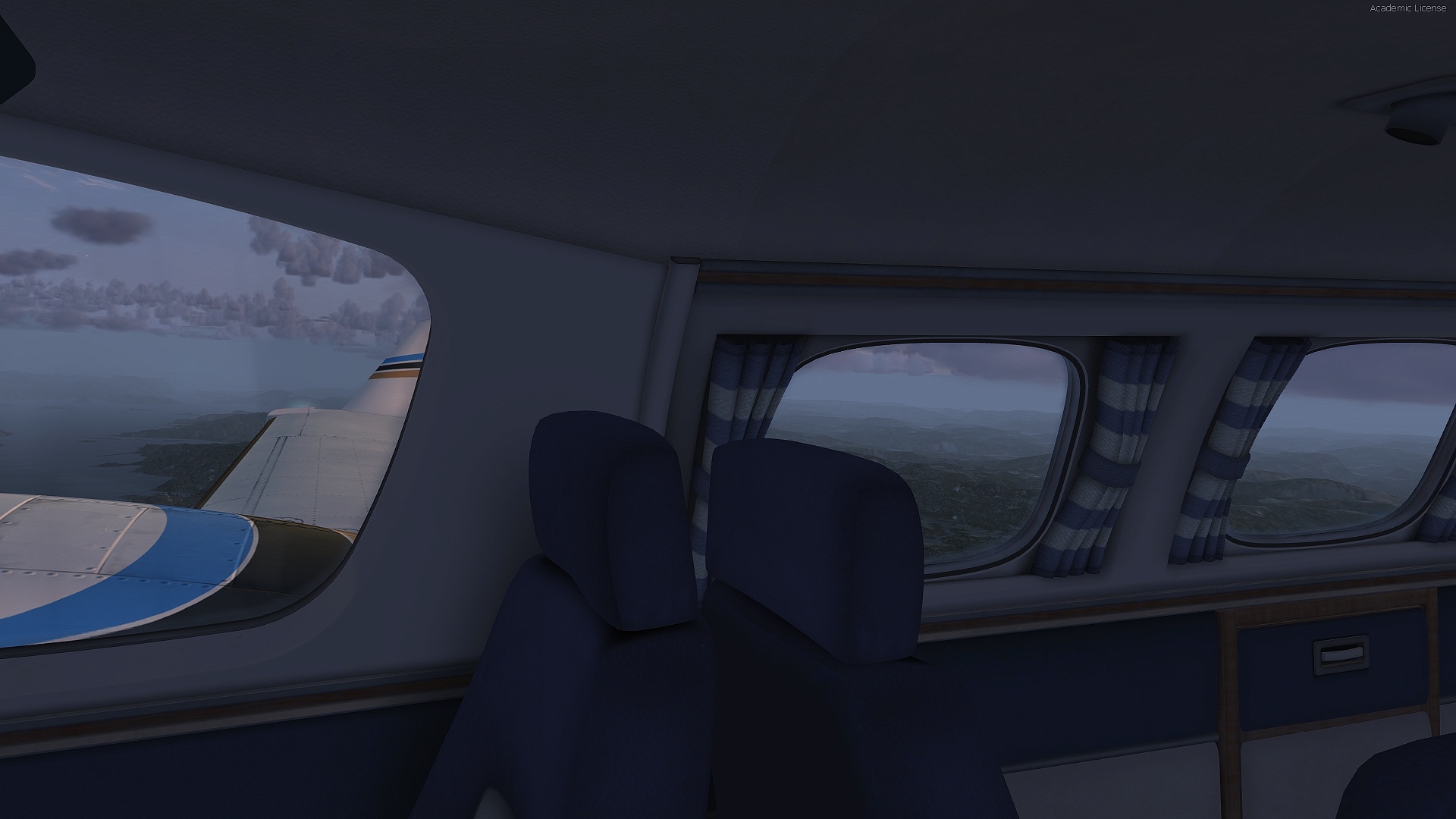
J'ai effectué ce vol il y a quelques jours, entre Narvik Framnes et Namsos
FP : [ENNK] EVD EVABO GUBAV TUXOT <début de l'approche RNAV> OTSEX ULROP KOSUN [ENNM]
CRZ ALT : FL250
Approche RNAV RWY 01 : depuis le Sud-Est, l'IAF est OTSEX  . Cap au Nord, direction ULROP en maintenant 3000ft, puis vers l'Est jusqu'à KOSUN. Ensuite, descente en suivant un angle de 3,5° : sur 5.9nm, à environ 140kts, cela donne une descente à 860ft/mn.
. Cap au Nord, direction ULROP en maintenant 3000ft, puis vers l'Est jusqu'à KOSUN. Ensuite, descente en suivant un angle de 3,5° : sur 5.9nm, à environ 140kts, cela donne une descente à 860ft/mn.














En attendant que ça sorte (a-t-on une vague idée de la période de sortie ?), il y a toujours la scène, très honnète, de Paal Kasnes dispo sur Avsim.
Chouette endroit pour venir poser son Turbine Duke.
Après vu la faible déclivité et irrégularité de la piste, c'est un peu dommage de se priver de traffic AI. Sur un altiport je pourrais comprendre mais là ?
Sinon, effectivement, ça a l'air magnifique.
Merci à tous les deux. Oui P3D est performant : j'ai effectué tout le vol en DSR 4x sans plantage et sans jamais tomber sous les 20 FPS. Avec une GTX 970 qui fait son office avec efficacité et en silence (elle est restée en passif pendant tout le vol).
Vol test du Turbine Duke V2 sous P3D 2.4
Pas d'anomalie à signaler malgré les warnings de Realair. Mais je ne pouvais pas attendre la version dédiée pour tester cette V2 sous P3D.
J'en profite pour remercier Jacques-Paul Bollard (alias JP67 sur ce forum) pour sa fantastique scène de LFST. Par temps de neige, en revanche, soit les déneigeuses de l'aéroport travaillent très vite et très proprement, soit la scène est dépourvue d'une dalle photo enneigée 
Vol effectué avec DSR (x4), météo réelle (ASN) et sweetfx perso. Aucune retouche post vol.
Images "cliquables" pour la version HD THX Dolby Surround 















J'ai effectué plusieurs tdp sous P3D sans remarquer le moindre plantage ou dysfonctionnement.
Du coup, à part le config panel qui ne fonctionne pas, je ne vois pas trop de quoi traite ce passage dans la FAQ fournie avec l'appareil :
Q: Can I run the FSX version of the Turbine Duke V2 in P3D2?
A: No. Not all features of the FSX version of the Turbine Duke V2 will work properly in P3D2. A
separate P3D2 version of the Turbine Duke V2 will be available shortly after the release of the FSX
version.
Je m'apprête à effectuer mon premier vol complet avec ce Turbine Duke V2, sous P3D.
Un petit EDVR - LFST.=V
EDIT : vol effectué, je confirme pas le moindre accroc. Images à venir dans la section appropriée.
Merci mais c'est trop d'honneur. Et puis nommer le PV de l'année le 1er Janvier, c'est un peu dommage
Et je viens de tester, à première vue, il semble fonctionner dans P3D v2.4. Le config panel non, par contre.
Il suffit de demander à l'installeur d'installer le Turbine 2 dans un dossier temporaire (genre c:\temp) et de déplacer les dossiers à la main.
Merci à tous ! Je ne pensais pas avoir "trouvé" la solution ultime mais je me suis aperçu de cette anomalie en modifiant le type de suspension dans le "config panel" entre "tarmac" et "grass". D'ailleurs toute modification de ce paramètre nécessite de procéder à nouveau à la correction dans le aircraft.cfg.
Je pense que tu as lu mon message "à l'envers"
Corriger la virgule par un point (comme pour les autres entrées), permet la bonne prise en compte des paramètres de la roue gauche, celle avec laquelle nous rencontrons des soucis.
Peut-être une autre piste : dans le fichier aircraft.cfg, dans [contact points] il y a une "anomalie"
point.0 =1, 0.82, 0.00, -3.75, 4000, 0, 0.633, 35, 0.13, 1.80, 0.35, 3.1, 3.1, 0, 152, 180 //Tarmac, non-castoring
point.1 =1, -8.04, -5.40, -3.94, 6000, 1, 1.00, 0, 0.30, 2.50, 0.36, 3.1, 3,1, 2, 152, 200
point.2 =1, -8.04, 5.00, -3.94, 6000, 2, 1.00, 0, 0.30, 2.50, 0.36, 3.1, 3.1, 3, 152, 200
Changez la virgule par un point, et paf ! ça fait des chocapics. 
Ah p..... l'ascenseur émotionnel ! 
J'ai cru que le Turbine 2 était enfin là.
Oui, slip c'est notamment la glissade, le glissement
J'essaye de franciser au maximum mais concernant le Forward Slip je ne connais pas l'expression française associée.
Dérapage de face ? Glissade en ligne droite ?
J'ai adoré te lire, vraiment très sympa comme petit report et belles images, une préférence pour celles prises en croisière et celle du forward slip ! eusa_clap
MErci, ce genre de plaisir me fait plaisir !
Sympa cette série, et puis le Grand Duke ne craint pas les arrivées de nuit
Il ne craint pas grand chose, à vrai dire 
Le slip, je l'ai appris dans Rise of Flight avec le Nieuport 17
Dans FSX / P3D la manoeuvre peut être exécutée à condition que le modèle de vol de l'appareil soit cohérent. Ce qui est le cas de ce fameux Duke, qui n'a décidément que des qualités
Belle scènes, belles images. La fluidité reste-t-elle acceptable ?
Bonjour à tous
Dans l'attente de la sortie du Royal Turbine V2, annoncée par Realair, je vole beaucoup ces jours-ci sur la V1 (qui est restée plus qu'honorable)
Cette fois-ci, un vol Juneau PAJN - Victoria CYYJ
Startup checklist à 13:55 heure locale. Le temps de faire chauffer un peu les PT6, terminer la checklist, demander l'autorisation de vol IFR vers Victoria, il est 14:10 lorsque je suis autorisé à rouler vers la piste 26.



Au point d'arrêt, alors que je m'attends à pouvoir partir sans attendre, le contrôle me demande de patienter bien sagement, le temps qu'un 737 Alaska Airlines en provenance d'Anchorage, se pose et quitte la piste.

C'est notre tour, pleins gaz, 95 kts, rotation, et on grimpe à 4000ft/mn,



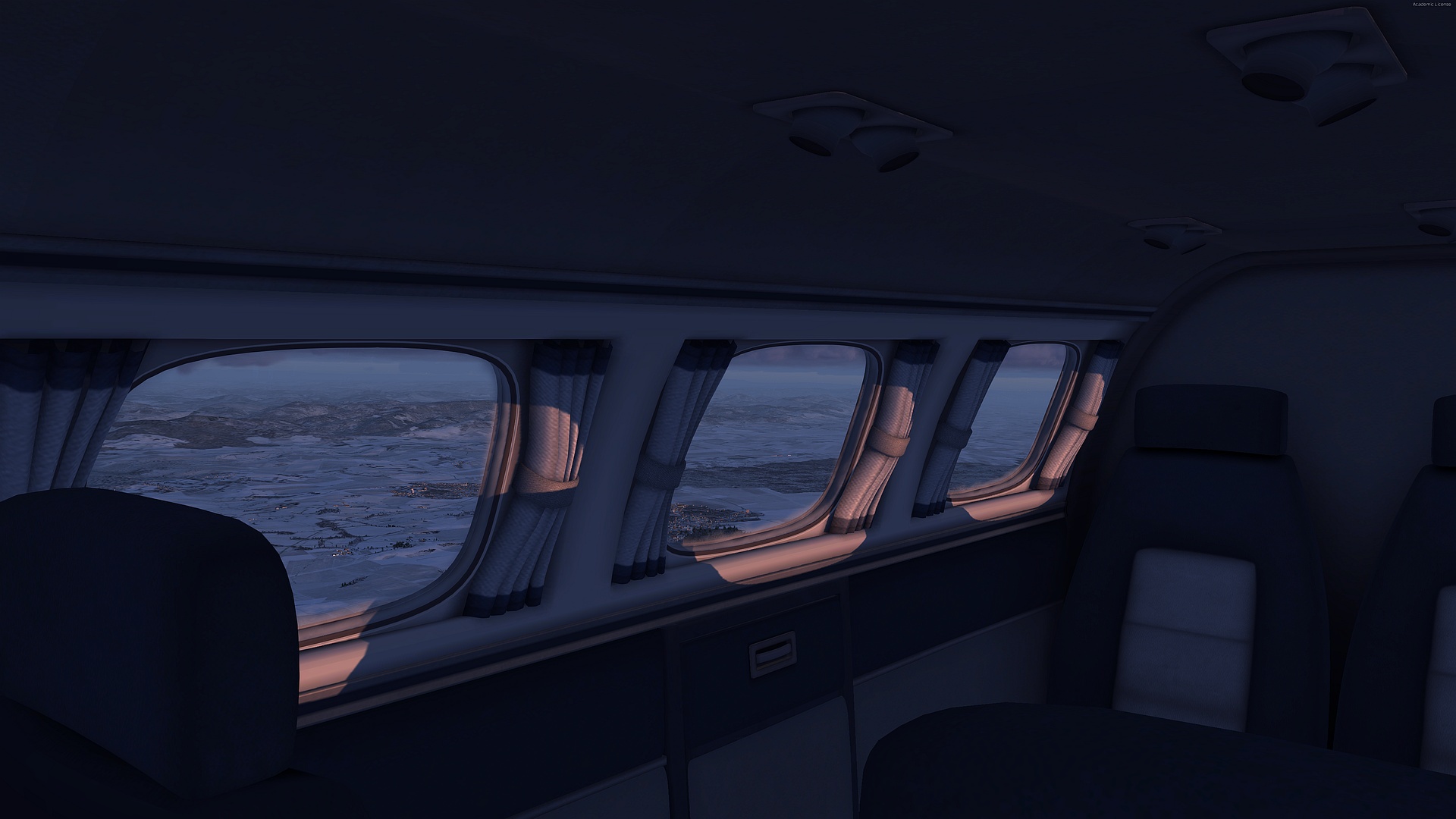
3 captures prises en croisière, entre Admiralty Island et Vancouver Island



Début de la descente au dessus de Vancouver Island, le contrôle nous autorise à effectuer une approche ILS piste 27, par l'arrivée APASS.3

Dernière occasion de dire au revoir à la lune, car selon le metar à l'arrivée, nous ne devrions plus la voir à nouveau avant de se poser à Victoria

Après avoir franchi APASS, viré à gauche en vue de l'aéroport à MIROL, et franchi OBSOP, le contrôle d'approche nous donne des vecteurs pour virer vers la droite et nous aligner sur la piste 27

Trop haut, trop vite. A 7 miles de la piste, nous sommes largement au dessus du glide, mais avec cette météo et moins de 40 gallons de carburant dans les réservoirs, il est temps de sortir un slip.

Forward Slip évidemment, pour rapidement perdre vitesse et altitude. Manoeuvre impressionnante mais efficace, que tous les pilotes US doivent maitriser avant leur premier lâcher solo (je ne sais pas si c'est le cas chez nous).

A 4 miles, nous voilà alignés horizontalement et verticalement, prêts à mener l'approche à son terme

A l'instant où les roues touchent le tarmac, la pluie cesse, et une légère éclaircie nous accueille

Roulage vers le stationnement, shutdown checklist. Le cockpit redevient sombre et froid, feutré. J'ai pris un immense plaisir à effectuer ce vol, j'espère vous en avoir fait partager un petit peu.


Du forward slip, évidemment 
Trop haut, trop vite, pas envie de remettre les gaz et de refaire un tour de machine à laver vu la météo.
En finale à Victoria (CYYJ) après un vol depuis Juneau. Je posterai un Flight Report complet plus tard.
ce qui me paraît important est l'efficacité - ou non - de l'utilisation du gyroscope d'un téléphone
C'est bien le but de mon post. La précision, avec les gyroscopes intégrés à nos smartphones est déjà parfaite.
J'imagine donc déjà un mini capteur de mouvement format oreillette, discret, et qui pourrait être relié par USB (ou bluetooth pour ceux qui ne craignent pas les ondes).
Seul souci (majeur), pas de 6DOF avec un gyroscope : en l'absence de référentiel stable (ex : la pro cam du trackir, la webcam pour facetracknoir) il faut se contenter des 3DOF fournis par le gyro. A moins qu'à l'avenir une appli puisse utiliser les données de l'accéléromètre pour permette les translations X Y Z.
Comme je l'ai précisé, il s'agit surtout de démontrer la viabilité de la démarche.
En ce qui concerne les ondes (question que je me suis posée), il est possible (et préférable) de passer par le tethering USB. La contrainte étant l'utilisation du cable, mais dans ce cas là, le téléphone peut être en mode avion et donc ne générer aucune onde liée au réseau.
Histoire d'alléger un peu la procédure, je pense qu'il doit y avoir moyen de faire communiquer directement Trinus Gyre Server et Prepar3D / FSX. En effet Trinus propose directement d'émuler trackir, mais hier soir je n'arrivais pas à passer outre facetracknoir.
Par ailleurs, par défaut, Trinus étant d'abord une application de Virtual Reality, l'image du PC est renvoyée sur le téléphone (pour pouvoir s'en servir comme d'un Occulus Rift). Dans le cas qui nous intéresse (headtracking simple), il est possible de désactiver cette fonctionnalité.
Je mettrai à jour la procédure dans les jours à venir en fonction de mes trouvailles.
Un titre un peu provocateur, certes, mais qui amène la réflexion.
Avant toute chose, je tiens à préciser que je ne suis l'auteur d'aucune des applications utilisées ici. Mais ayant utilisé ces différentes applications pour parvenir à mes fins, je tenais à partager la démarche avec vous.
La plupart des smartphones récents sont équipés de gyroscopes 3 axes. Ce sont ces petits capteurs qui permettent de tourner dans un jeu de voiture en inclinant son téléphone, par exemple, ou d'utiliser les applications de réalité augmentée.
D'où l'idée d'utiliser son smartphone pour contrôler la vue dans P3D / FSX
Avantages :
- le coût, à condition de posséder un smartphone, est < 4 € (prix de l'appli sur le Google Play)
- la précision du gyroscope
- les conditions d'éclairage n'ont aucune importance, à l'inverse du facetracking avec webcam (type Facetracknoir etc)
Inconvénients :
- tenir son smartphone dans la main ou pire...
- trouver un moyen de le fixer sur sa tête (oui...)
Il s'agit donc plus d'une démonstration de faisabilité (proof of concept comme on dit dans la langue de Ronald Mc Donald)
La démarche décrite ci-dessous peut sembler rebutante, mais ce n'est que parce que je l'ai détaillée au maximum. L'utilisation "courante" n'est pas si fastidieuse, une fois que le principe est compris, et les applications paramétrées correctement.
Outils nécessaires :
- FSX / P3D avec simconnect installé (voir l'abondante littérature traitant de la bonne installation de simconnect)
- désactiver les logiciels pouvant interférer comme ezdok, les modules camera de Opus, etc.
- un smartphone avec gyroscope et la possibilité de partager la connection (tethering) soit 90 % des téléphones de moins de 3-4 ans // va générer le mouvement
- l'application payante Trinus Gyre // va envoyer les données de mouvement à un serveur local
- le serveur windows Trinus Gyre Server // va recueillir les données de mouvement sur le PC et les injecter dans l'appli de notre choix, en l'occurrence :
- FacetrackNoIR // va interpréter les données et les envoyer dans FSX/P3D via simconnect
Marche à suivre :
Partons dans l'hypothèse, pour commencer, que nous raccordons notre smartphone via USB au PC sur lequel est installé FSX/P3D. C'est la méthode la plus stable, son principal souci (en plus du cable) étant qu'elle désactive, le temps du test, la connexion internet de votre PC (plus précisément, celui-ci se connecte à votre smartphone plutôt qu'à votre réseau local, tout rentre dans l'ordre en débranchant le smartphone)
- sur le smartphone, partager la connexion : Paramètres > plus... > Partage de connexion > cocher "Via USB" // attendre que le PC reconnaisse et configure la connexion partagée de votre smartphone
- sur le smartphone, lancer Trinus Gyre, paramètres par défaut, et démarrer le partage de données (gros bouton à droite)
- sur le PC, lancer FacetrackNoIR, avec comme 1. tracker source 1st "FTNOIR UDP" // dans settings juste en dessous, Port-Number doit être réglé sur 5556 (soit le port par défaut utilisé par Trinus, 5555, +1). 2.Game Protocol (à droite) doit être FSX Simmconnect. 31. Cliquez ensuite sur Start (en dessous de GO !)

- sur le PC, lancer Trinus Gyre Server,paramètres par défaut, et démarrer la réception de données (gros bouton en bas à droite). Si la connection avec le smartphone est établie, Trinus doit vous proposer de streamer (envoyer) les données vers l'une de vos applis ouvertes. Choisissez FacetrackNoIR puis validez.

- ne reste plus qu'à lancer FSX / P3D
Facultatif
- pour s'affranchir du câble et pouvoir utiliser à la fois Trinus et sa connexion internet, possibilité d'utiliser le wifi : à condition de connaitre l'IP de son PC, du smartphone, et que les deux soient sur le même réseau local (par exemple le PC connecté en ethernet sur une box, et le smartphone connecté au réseau wifi de cette même box)
- paramétrer une combinaison de touches pour centrer la vue : dans FacetrackNoIR, dans Options > Keyboard & Mouse shortcut, attribuer une combinaison de touche à la première ligne "Center". Par exemple, ctrl + maj + F1. Appuyer sur ces touches, en jeu, permettra de remettre la vue à zéro à la position actuelle du smartphone
Une petite démonstration, en l'état (désolé pour le son, ShadowPlay n'était pas d'humeur à l'enregistrer apparemment...)
Quel dommage de se poser sur du goudron, avec d'aussi gros pneus !
Mais très belles images,le type de vol que j'adore. Quelle est la scène ?
Je confirme l'utilité de la checklist imprimée et assemblée selon le lien que j'ai donné plus haut.
Hier, perte de puissance inopinée sur le moteur droit en descente vers KMKG au dessus du lac Huron. Avec la checklist à portée de main, j'ai pu tenter une remise en route. En vain, en l'occurrence, et j'ai du me poser, à destination, avec une hélice en drapeau.

