Vous n'êtes pas identifié(e).

Est-ce que quelqu'un à le même problème que Jean-pierre ?
Win 10pro - AMD 7800 X3D watercoolé - 64 Go - 2xSSD 2To - Nvidia 4070 TI Super - Ecran 34" WQHD
Hors ligne

Je n'ai jamais eu ce problème... C'est avec n'importe quel vol enregistré avec l'A320, ou un en particulier ?


Hors ligne
Moi non plus, ni sur A320, ni sur A318beta
Une question supplémentaire
Pour la création des aéroport, lorsque les cartes indiquent sur une Star une vitesse max à un point comme 220kts par exemple,
Il vaut mieux programmer 220, 210 ou 200kts?
Merci
Hors ligne
En fait cela dépend. 220 est un maximum, donc rien ne t'empeche de mettre moins. Après, cela va dépendre de la distance de ton waypoint par rapport à l'aéroport par exemple. Si tu es très proche de la finale, il vaut mieux mettre moins.
Mais il faut aussi toujours avoir en tête que le FMC a toujours un "waypoint d'avance". Je m'explique :
Sur le carte, on te dit qu'au passage de tel waypoint, tu dois avoir par exemple une vitesse de 220 kts.
Dansl e FMC (qui utilise les routines du GPS de FSX), ce waypoint (et donc la vitesse qui lui est associé) devient actif dès que tu passes le waypoint précédent.
Donc la vitesse que tu attribues à un waypoint, devient active non pas quand tu passes ce waypoint, mais quand il devient le waypoint actif dans le plan de vol (il devient la prochaine cible).
Donc si ton waypoint précédent est à 50Nm en arrière, tu vas te retrouver à "te trainer" à 220 pendant 50 Nm !
Donc parfois, il faut décaler la contrainte de vitesse d'un waypoint.
Imaginons que ta STAR est composé de 4 WPT, appelé A, B , C ,D et que tu as une contrainte de viteesse au WPT C de 220 et au WPT D de 200.
Si la distance entre B et C est grande, alors il faut décaler tes contraintes de vitesse ; laiser C sans contrainte, ou une contrainte élevée du genre 280, et mettre la contrainte de 220 à D.
Pourquoi, parceque c'est quand l'avion va dépasser le WPT B que C deveindra actif et donc que la vitesse que tu lui a associé sera appliqué. et tu vas devoir voler à 220 pendant une grande distance.
Hors, la carte impose la vitesse de 220 au passage à la verticale du waypoint, et comme le GPS de FSX "anticipe" le passage d'un waypoint (c'est à dire que le WPT D deviendra le waypoint actif 2 à 4 Nm avant de passer à la verticale de C, alors tuauras le temps de ralentir.
Comprends tu mon explication ? Toujours pensez que la vitesse que tu appliques a un waypoint s'applique dès qu'il devient actif dans le plan de vol, donc dès que tu as frnachit le waypoint précédent. C'est comme si tout était décalé d'un waypoint.
Ce phénomène est génant que pour les vitesses, pas pour les altitudes.
C'est pour cette raison aussi que la vitesse de "0" que l'on doit mettre au FAF, dan sle fichier d'approche, doit parfois être placé au WPT suivant le FAF.
En fait dans une approche, cela va dépendre si l'avion arrive en palier jusqu'au FAF, ou si il est déja sur un plan de descente.
Si il est en palier jusqu'au FAF, alors il faut décaler d'un WPT la vitesse "0", sinon, l'avion va voler son étape en palier pour atteindre le FAF à une vitesse beaucoup trop basse, et donc avec un cabré important.
Si le FAF est déja dans le plan de descente, alors tu peux mettre "0" au FAF, car comme il est en train de descendre, il mettra plus de temps à ralentir et il n'aura ps cette assiette cabré du à une vitesse basse.
Je vais améliorer le manuel sur ces points, en donnant les differents cas de figure;
C'est enfin, il faut toujours garder en tête que a contrainte des 250 IAS en-desous de 10000ft est automatiquement appliquée par le FMC.
Dimanche, quand j'ai fait un vol vers ENTO, j'ai utilisé ta STAR qui passe par ASKAR, je crois, en vanent du sud, pour atterir sur la 01 en ILS. Comme j'arrivais un peu haut en altitude, j'allais encore vite et il a un virage à 90° avant d'atteindre le WPT qui a un circcuit d'attente et qui doit être le dernier WPT de la STAR, sur lequel il y a une contriante de vitesse de 220 de mémoire (et aucune contrainte avant).
Donc j'ai passer le virage à 90° u peu vite, en overshootant le virage, et l'arrivée dans le circuit à 220, alors qu'elle se fait presque à 90° est trop rapide. Là, tu as l'exemple ou il faut ralentir avant par exemple.
Et le waypoint suivant le circuit est le FAF, donc tu passes de 220 à la vitesse d'approche brutalement ,mais comme tu es en palier, ce n'est pas très génant, l'avion ralenti sans problème et sans avoir à sortir les aérofreins.
Si ce tronçon avait été sur un plan de descente, cela aurait posé un gros problème pour ralentir !
Mais dans certain cas, il faut mettre une vitesse inférieur à celle qui est marqué sur la carte, surtout si tu est très proche du seuil de la piste.
Toujours penser que la vitesse indiquée sur la carte est une vitesse maxi une vitesse limite !
C'est pourquoi, parfois, il est impératif de faire un vol d'essai, quand une STAR semble "douteuse" ou composé de peu de waypoint.
Avec le A320, pas de problème, mais avec un A380, tu tournes pas aussi bien à cette vitesse là. Et le FD-FMC sera bientot sur le A380 !
Les essais réel permettent de comprendre beaucoup de choses !
Dernière modification par Fdd_fr (03/03/2015 04:16)
Win 10pro - AMD 7800 X3D watercoolé - 64 Go - 2xSSD 2To - Nvidia 4070 TI Super - Ecran 34" WQHD
Hors ligne
Faisons le sur du concret,
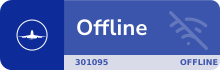
Voici une des star d'ENTO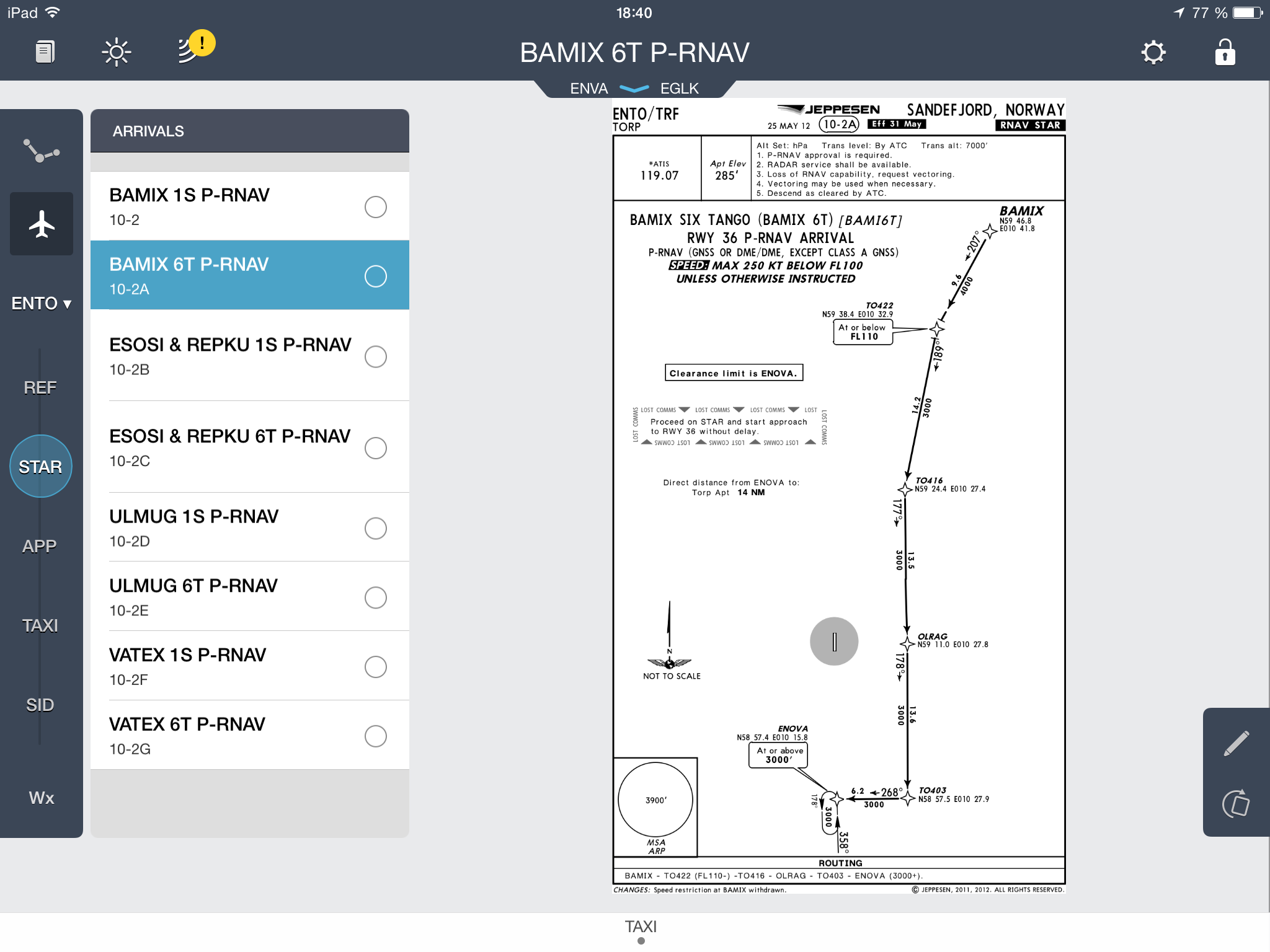
Effectivement sur cette star, j'ai mis uniquement la contrainte de 220kts sur ENOVA afin de ne pas arriver trop vite sur l'approche
Par contre, si on faite le circuit d'attente ca fait arriver très vite
Tu nous conseils quoi comme vitesse?
Egalement l'image de l'approche ILS qui suit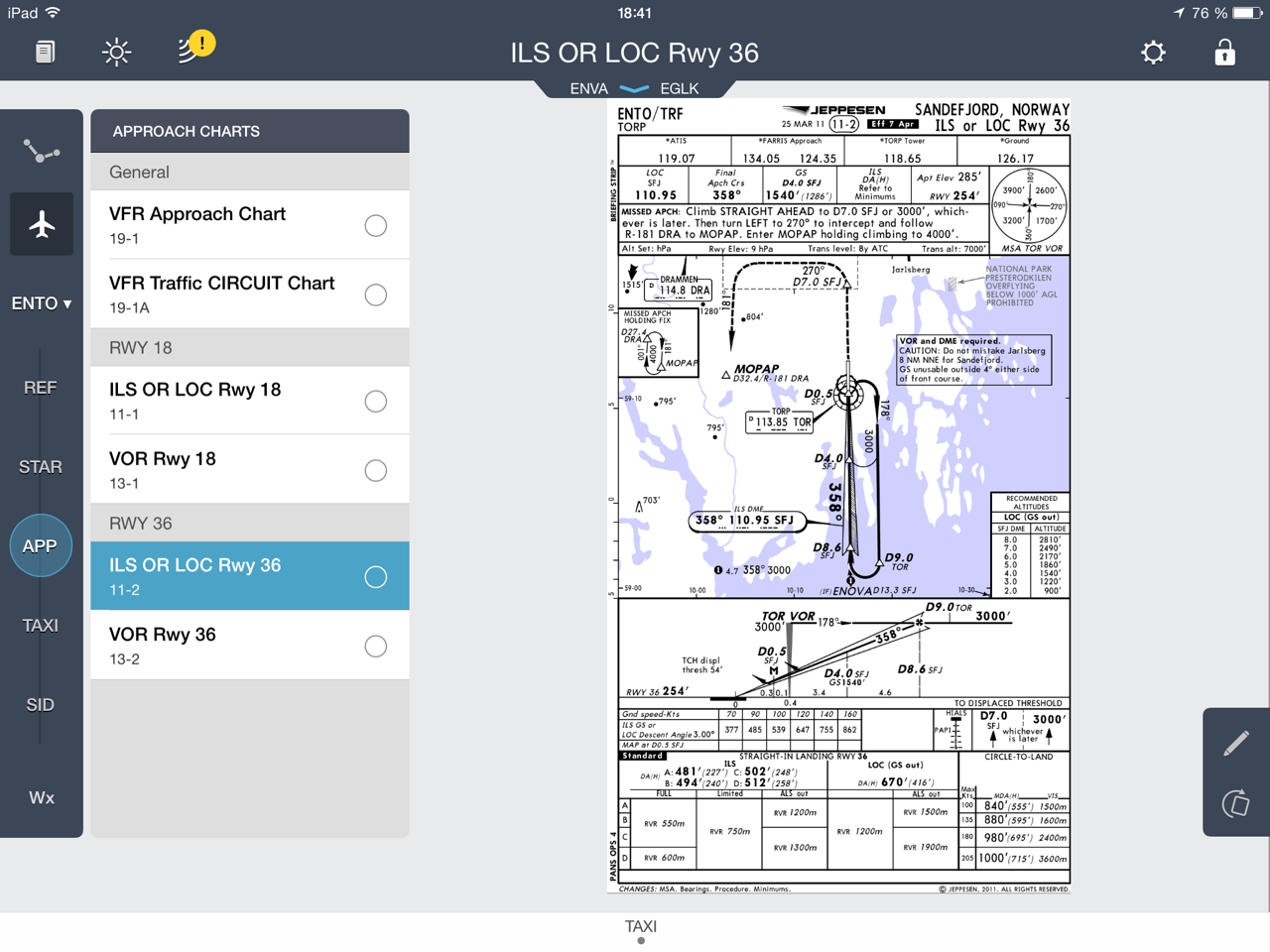
Autre question sur le meme sujet
Sur cette star pour ENVA
J'ai compris qu'il ne fallait pas mettre la contrainte 220kts sur le point VEDOL car sinon on va se taper 50miles à 220kts
Mais du coup si on fait le circuit d'attente on risque de le faire à la vitesse définie pour les "holding" c'est à dire 230kts car holding à 6000''
Je me doute qu'il est difficile de faire une réponse valable pour tout les cas mais comme je débute je voudrais un pti conseil.
Dernière question,
Lorsque l'on a un circuit d'attente sur l'approche comme celle ci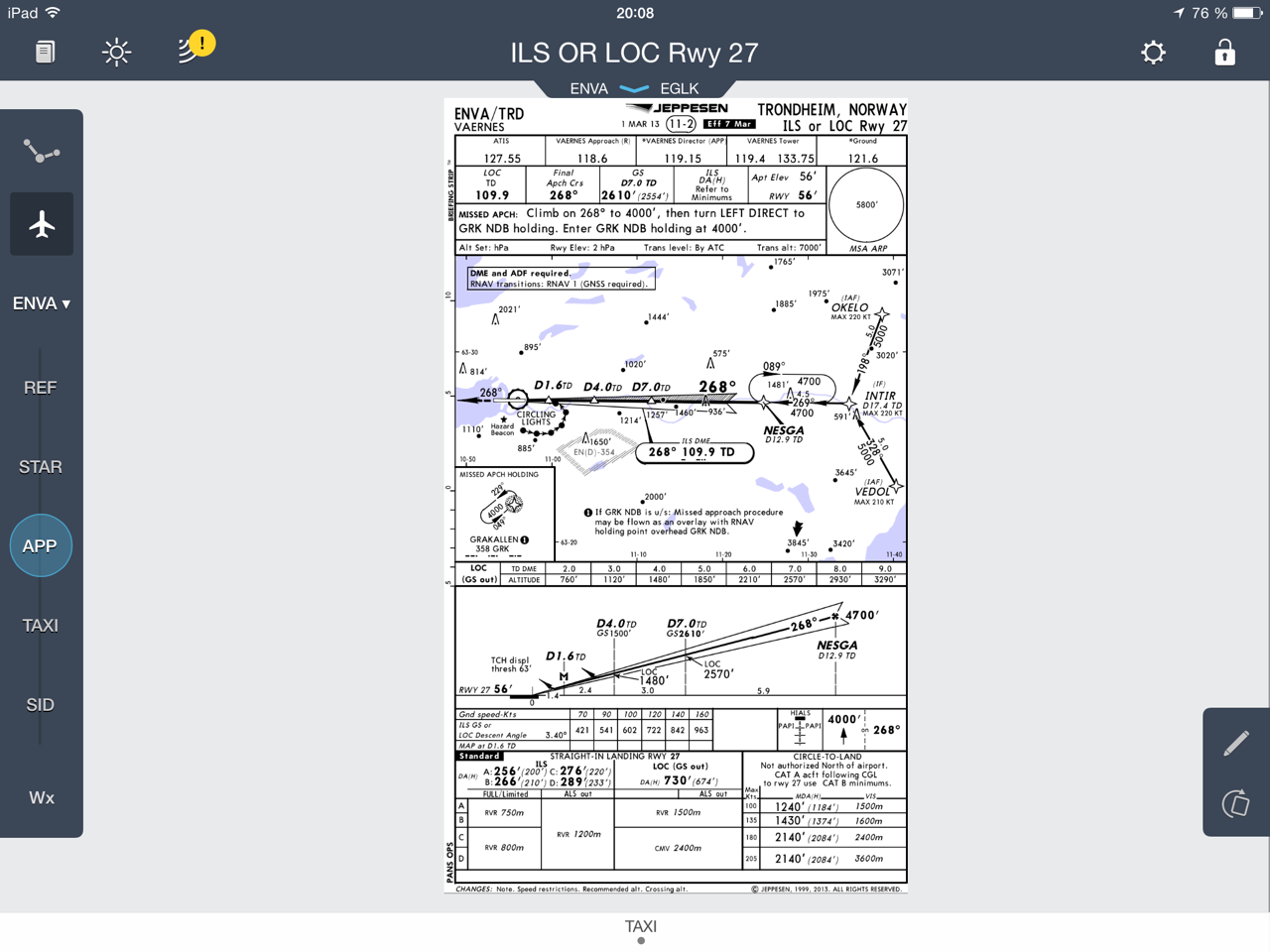
Cela signifie quoi? que le "holding" sera réalisé en configu d'atterissage avec les volets à bloc et le train sortit ou alors en vdescente à 220kts? (auquel cas il faut créer un autre point pour définir la vapproche?)
Merci pour ces précieux conseils.
C'est tout pour aujourdhui 
Dernière modification par guitou1111 (03/03/2015 20:23)
Hors ligne
Tes distances sont assez courtes entre tes waypoints de ta STAR et ENOVA est situé très proche de la piste, donc il faut arriver à ENOVA à une vitesse relativement basse.
Personnellement, j'aurais commencé à mettre une contrainte de vitesse à TO416.
Comme ceci :
TO416 : 230 (cela permet sur quasiment tout type d'avion de sortir au moins de les becs de bord d'attaque qui aideront à ralentir)
OLRAG : 220
TO403 : 200 (pour éviter de trop overshooter le virage à 90°)
ENOVA : 190 ou 200 maxi (cela laisse assez d'élan pour atteindre le FAF qui est à 4 NM)
POUr le circuit d'attente d'ENOVA, je le coderai pour une entrée opposée, car arrivant à 90*, l'avion aura plus de faciliter à couper le circuit en diagonal que de se mettre d'abords dans le bon cap et de tourner.
DOnc le circuit d'attente de ENOVA :
3 (entrée opposée circuit gauche
358 (cap initial)
178 (segment opposé)
60 (secondes car une arrivée à 90° en codant une entrée opposé permet à l'avion de ne faire q'un virage à 45° pour prendre la diagonale et il va déjà dans le bon sens pour se retrouver face à VEDOL, lors de son second virage).
Ensuite, pour ton approche, tu peux mettre la vitesse du FAF à 0. Il n'est qu'à 4 NM de ENOVA, et comme tu es encore à 190 kts à ENOVA, l'avion aura assez de vitesse , durant se palier, afin d'éviter de voler avec une assiette trop cabré)
Pour la STAR d'ENVA, là il peut se poser un petit problème :
Tu peux observer qu'il y a une grande distance (50Nm) entre SORAV et VEDOL, et la carte d'intique que tu dois être à 220 max à VEDOL.
Donc c'est là ou justement, il ne faut pas mettre la contrainte de vitesse à VEDOL. Pourqui, parce que si tu mets une limite de 220 kts à VEDOL, alors cette vitesse sera appliquer dès que tu aura franchit SORAV (au franchissement de SORAV, VEDOL devient le waypoint actif dans le plan de vol, donc dans le FMC, et toutes les données associées à VEDOL vont être appliquées).
Dans la vrai vie, l'équipage à la carte, et sait qu'il devra ralentir à VEDOL; NOus, nous partons du principe que les utilisateurs du A320 FD-FMC n'ont pas la carte sous les yeux, donc il faut trouver une solution pour éviter de faire ses 50NM à 220 kts (sinon, ça va être long).
2 Solutions possibles :
- Le FMC par défaut gère la vitesse quand l'avion passe l'altitude de 10300 ft en descente de la manière suivante, afin de ralentir progressivement en descendant (quand il n'y a pas de contrainte de vitesse d'indiqué pour un waypoint donné, dans le fichier (STAR_data.csv, c'est à dire que la case vitesse est laissé vide) :
J'utilise la formule suivante :
290 - ( ( 29 - ( Altitude en pieds / 1000 ) ) *2.7 )
Donc par exemple, à 10000ft, la vitesse par défaut du FMC sera de :
290 - ( ( 29 - ( 10000 /1000 ) ) * 2.7 ) =
290 - ( ( 29 - 10)) * 2.7) =
290 - (19 *2.7)=
290 - 51.3 = 238.7 kts
Donc arrivée à 6000 ft, l'avion aura une vitesse de (290 - 62.1) = 227.9 kts
Donc un peu trop rapide par rapport à la contrainte du circuit (d'autant plus que la contrainte automatique d'AIRBUS pour les circuit d'attente situé entre 6000 et 14000 et de 230 kts, mais le FMC choisira la vleur la plus basse, donc si l'avion est bien à 6000 ft en arrivant à VEDOL, le FMC choisira 228 kts par défaut. Cela reste trop élevé, sans parler du fait que si l'équipage à déclencher sa descente bien après le TOD, l'avion risque d'arrivé à VEDOL à une vitesse supérieur (car à une altitude plus élevée que 6000ft).
Dans ce cas particulier, la meilleur solution est ce créer sur le segment SORAV-VEDOL un waypoint "U", utilisateur, disons 5 Nm avant VEDOL.
Comme cela ton ton fichier STAR, sera ainsi :
SORAV : pas de contrainte de vitesse
Waypoint "Utilisateur" situé à 5Nm de VEDOL : pas de contrainte de vitesse
VEDOL : COntrainte de vitesse de 220 ou moins
Ainsi, les 50Nm ne se passerons pas à la vitesse d'une tortue, et tu seras bein à 220 en arrivant à VEDOL (puisque la contrainte de 220 de VEDOL, s'appliquera dès que tu auras franchit le waypoint "U".
Personnelemnt, je mettrais même 210 kts à VEDOL, car tu est relativement prêt de la finale, donc faut pouvoir ralentir après.
Tu peux appeler ton waypoint "U" "RM081" par exemple pour "route magnetique 81°" et tu le crée avec PLAN-G pour le définir dans le fichier STAR par Latitude et longitude.
Pou r le codage du circuit de VEDOL :
Sens du circuit : 1 (gauche, entré normal)
cap initial : 26
cap retoour : 206
durée : 80 ou 90 secondes, car comme tu n'arrive pas parfaitement dans l'axe du circuit, l'avion va mettre un certain temps avant de se mettre dans le 26° et donc avant de faire son premier virage, donc cela veut dire qu'il aura dépassé VEDOL de 1 ou 2 Nm, donc il faut lui laisser le temps de revenir assez sur ses pas, pour effectuer son second virage et de bien se retrouver dans la bonne position par rapport à VEDOL.
Si tu mettais un temps trop court, l'avion risquerai de faire son virage de retour et de se retrouver avec VEDOL dans le dos, donc ça serait la pagaille.
Pour les temps des circuits d'attente, il faut mettre 60 secondes, si le circuit est à basse altitude et avec une entré bine dans l'axe, mais il faut augmenter ce temps si l'altitude est élevé, car la vitesse sera plus grande et donc le rayon des virages plus grand ou si l'entrée ne se fait pas dans l'axe.
Un circuit haute altitude (+ de 10000 ft) même avec une entrée dans l'axe doit avoir un temps compris entre 75 et 90 secondes.
Voilà , j'espère que mes explication auront été claire et surtout n'hésite pas.
Pensez toujours qu'il est parfois utile de créer des waypoints fictif, type "U" , cela permet de régler ce genre de problème.
Et ayez toujours en tête, que durant une STAR, le FMC gère la vitesse par défaut (s'il n'y a pas de contrainte de vitesse à un waypoint) de la manière suivant :
Pour la famille des A32x les A330/340 auront des valeus differentes) :
---------------------------------------------------------------------
- vitesse de descente ente l'altitude de croisière et l'altitude de conjonction : MACH 0.77
- vitesse de dezscente entre l'altitude de conjonction et 10300ft : 300 kts
- Vitesse de descente entre 10300ft et le dernier waypoint de la STAR : 290 - ( ( 29 - ( Altitude en pieds / 1000 ) ) *2.7 ) donc une vitesse qui va partir partir de 240 kts à 10000ft et décroitre automatiquement de 2,7 kts par tranche de 1000 ft d'latitude perdu.
Vitesse gérés par défaut dans le FMC dans les circuits d'attente :
265 kts si circuit au-dessus de 14000ft
230 kts si circuit compris entre 6000 et 14000ft
200 kts si circuit en-dessous de 6000
Si il y a une contrainte de vitesse à un waypoint, qui est supérieur à la contrainte interne du FMC, c'est toujours la vitess ela plus basse qui sera imposé par le FMC.
Amicalement
François
Dernière modification par Fdd_fr (04/03/2015 07:13)
Win 10pro - AMD 7800 X3D watercoolé - 64 Go - 2xSSD 2To - Nvidia 4070 TI Super - Ecran 34" WQHD
Hors ligne
C'est clair, merci, je n'ai plus qu'à m'y remettre
Hors ligne
C'est bon, je viens de reprogrammer l'ensemble des vitesses et holding de ENTO et je suis en test, ca marche mieux comme ca les holding
Merci
Par rapport au manuel pour la création d'aeroport, si tu peux rajouter que pour les holding qui arrive a exactement 90°, il faut les considérer comme avec étant virage opposé. J'ai eu beaucoup de doute sur la question et tu m'as confirmé que je m'étais trompé
Egalement le chapitre ci dessus sur le choix des vitesses pour la star est un bon complément pour le manuel
Le reste est très clair et m'a permit assez facilement de créer un aeroport.
J'engage les utilisateurs du FD FMC a essayer également
Hors ligne
Je vais améliorer le manuel; Le temps, c'est toujours le temps qui me manque. Mais souvent, c'est une histoire de logique.
Il faut toujours "imaginer" la trajectoire de l'avion, avoir en tête sa vitesse à un endroit particuler, avoir en tête son altitude (car plus il est haut, plus il va vite par rapport au sol), et faire des tests réels.
POur les premiers aéroport, je testais en réel quasiment chaque approche, pour voir ce qui n'allait pas.
Maintenant avec l'expérience, je sais ou sont les pièges, les situations ou il faut réfléchir et faire attention.
Je trouve la création de ces fichiers d"aéroports passionantes, plus même, maintenant que la programmation, c'est pourquoi le panel n'évolue plus beaucoup, car je passe plus de temps à bosser sur les fichiers aéroports.
Avant, tu vois, je me disais qu'en programmant ce mini-FMC, j'allais me mettre à essayer de comprendre la façon dont on se sert d'un vrai FMC (c'est à dire la manière dont on rentre les données du plan de vol dedans) mais plus le temps à avancer, plus je me suis dis que j'avais raison ; la seule vrai parti inintéressante du FMC, c'est sa manière de gérer le comportement de l'avion, la gestion moteur , la gestion de l’assiette lors de la montée et de la descente et c'est pourquoi j'ai aimé programmer cette partie, dont tout le monde se fout, mais qui est vraiment la partie la lus intéressante.
Ceux qui se dise "hardcore simer" et qui méprise tout ce qui ne ressemble pas à un vrai FMC sont fier d'entrer des données dans une gauge qui ressemble à un vrai FMC, mais jamais il ne comprendront que la vrai partie inintéressante est comment le FMC contrôle l'avion, ses moteurs, calcul son TOD, etc .......parce que cela, il ne le voit pas, c'est invisible, mais pourtant c'est la partie la plus passionnante.
Et puis j'ai enfin appris à quoi servait les fonction Tangente, ARC sinus, Cosinus, grace à cela; alors que l'école avait toujours échoué pour me l'apprendre 
VAS FMC ressemble à un vrai FMC, mais ce n'est qu'un erzast du GPS de FSX, il ne contrôle rien du tout concernant l'avion, donc pour moi, je ne comprends pas son intérêt, sauf avoir l'impression de faire comme dans un vrai en entrant des points.
Aucun intérêt. Le look je m'en fout; par contre comment ça marche ? ça s'est intéressant !
La partie réalisation des fichiers d'aéroport est passionante, car elle permet aussi d'analyser les cartes d'en comprendre la logique et cela m'a permis de comprendre plein de chose sur le fonctionnement du FMC et comment il devait gérer le comportement de l'avion.
Aujourd'hui, je suis content de ce que j'ai fait, et je piaille d'impatience d'avoir le retour de traduction du manuel pour pouvoir publier l'avion sur AVSIM. Jamais j'aurais cru il y a 2 ans , sans rien y cjnnaitre en XML, en arriver là.
Mon FMC n'est pas beau, par contre il gère la montée de manière quasi parfaite.
La descente, elle ne l'est pas, car normalement, en mode "DES", les moteurs ne restent pas à 0, le FMC utilise non seulement la gestion de l'angle de descente mais aussi les moteurs, pour calculer l'arrivée à la bonne altitude à chaque contrainte. Pour l'instant FD-FMC fonctionne de manière équivalente en mode "DES" qu'en mode "OP DES"(sauf qu'en mode "OP DES", il cible une altitude sélecté et pas managé, bien sur ! ) alors que dans le premier cas, il peut utiliser les moteurs si nécessaire. Je ne l'ai pas fait par manque de temps et parce que je voulais terminer le projet et publier.
Combien de chose j'ai commencé dans mavie, sans les terminer.... là je ne veux pas que cela soit le cas. Je dois en être maintenant à + de 3000 heures de travail sur ce projet ( et plus de 25 000 lignes de code XML ! ), pour quelque chose qui ne se voit pas (le contrôle de l'assiette lors de la montée et de la descente et la gestion du mode Mach en réel, qui n'existe pas dans FSX par défaut).
Aaarf, j'ai hâte que ce manuel anglais arrive et de publier mon boulot sur AVSIM !
Et je vous dis un énorme MERCI à vous tous, qui m'avez aidé, soutenu. Sans vous, je n'aurais jamais pu réaliser ce job, car pour trouver les bugs, il faut faire plein d'essais, dans pleins de circonstances différentes, que vous avez fait et qui m'ont fait gagner un temps precieux.
MERCI à vous tous !
Avec mes 50 bougies soufflées il n'y a pas longtemps, cela me permet de faire fonctionner le peu de neurones en ma possession et d'éviter qu'ils ne se détériorent trop vite 
Dernière modification par Fdd_fr (06/03/2015 06:35)
Win 10pro - AMD 7800 X3D watercoolé - 64 Go - 2xSSD 2To - Nvidia 4070 TI Super - Ecran 34" WQHD
Hors ligne

Bonjour,
Je suis ton boulot depuis le début et tous ceux qui au contraire de moi viennent te donner un coup de main, voir de neurones.
Pour différentes raisons je n'ai pas encore installé l'avion, manque de temps, de paresse aussi. Mes neurones à bientôt 73 ans sont en plus mauvais états que les tiens, je te rassure les tiens me paraissent en pleine forme.
Je serai bien incapable de commencer un tel boulot et surtout d'aller jusqu'au bout. Mes taches ne doivent pas être de trop longue durée. Je papillonne entre sorties, lecture, ciné et un peu FSX avec ton A 321 sans FMC... Me tape pas sur les doigts.
Encore un grand bravo.
Bonne journée
Ber84
PS: pour tous, je suis allé visiter vendredi dernier le nouveau musée AEROSCOPIA à Toulouse Blagnac. SI vous passez par là n'hésitez pas, et profitez pour la visite de l'A 380 que j'ai déjà fait.
Tout reste à faire...
Hors ligne

Bonjour François, 
Encore une fois merci et bravo.
Sur les approches d'Orly, il y a à chaque fois deux planches :
* une planche APPROCHE AUX INSTRUMENTS RNAV xx,
* une planche APPROCHE AUX INSTRUMENTS ILSxx qui se termine sur la piste,
avec un grand "trou" entre le deux.
Il faut donc inventer la trajectoire pour raccorder les deux planches.
Jean-Pierre
Ma configuration : CM: MSI A88-XM-E35 FM2, CPU: AMD FM2 A4 5300 - 3.4 GHz, Mémoire : DDR3 - 8 Go, Carte graphique : nVidia GeForce 6500 - 1 Go, Windows 7 Familiale (64 bits)
"Seuls les avions mordent les fous!"
Hors ligne
Salut à tous et à toutes
Merci,François,de ce petit morceau de ta vie raconté sur le fauteuil rouge(comme dans l'émission que je n'ai d'ailleurs pas encore regardée car je ne peux pas programmer ton fantastique fmc en même temps!).
Comme Ber84 que j'ai devancé depuis Janvier,je vous rassure, le rendement de vos neurones n'a jamais été aussi bon car ils sont mis à l'épreuve régulièrement,profitez en bien et longtemps.
Bien sur,je suis en attente aussi des machines complètement finies et le Ahhhhhhhhhh..380 pour lequel tu as laissé entrevoir une adaptation,mais prends ton temps car Jean-Pierre a besoin de longerons pour ses deux planches(souvenir de construction pour les modèles radio-commandés!!)
C'est donc encore avec beaucoup de respect et de remerciements pour ton oeuvre,que je te souhaite et à vous aussi d'en profiter pleinement.Bonne fin de semaine.Gérard
POSITIF P3Dv4.5;w7 64 Premium;Asus P8Z77-V LX2;IntelI5 3570K 3,4GHz oc 4,1 ;Corsair 2x8Go 2400MHz GDDR3;Cool masterEVO212;Seagate 500Go SATA; AMD RX580 8Gb GDDR5;Alim 650W;DVD SATA LG;Boitier Zalman Z11.Ecran 27" IIYAMA G2740HSBU Black Hawk 1920X1080 75Hz.Remerciements à Didier"Lagaffe"
Hors ligne
Merci à vous pour vos messages; c'est vraiment sympa. Pour la version finale, je vous promets que ce n'est plus qu'une question de jour. Maintenant je ne peux pas mettre la pression à la personne qui s'est gentiment proposé de faire cette traduction; cela serait vraiment incorrecte de ma part, et je crois qu'il veut vraiment faire une traduction propre, donc je le laisse faire.
Jean-pierre, de mémoire, quand j'avais fait Orly en verion 3, je n'avais pas eu le souvenir d'avoir eu de grosse difficulté. Il y avait peut-être un trou sur les STAR qui venaient du sud ouest de mémoire. Je t'enverrai ce soir mon fichier XLS de l'époque et les cartes qui vont avec. Je mense que seulement quelques procédures ont changé, mais pas l'intégralité.
Par contre, c'était basé bien sur les waypoints de G Mitchell et les altitudes des seuils des pistes dansles fichiers d'approches ne doivent pas être bonne.
Géran, le A380, j'en rêve. Le problème, c'est que le PA A380 n'a qu'un cockpit 2D pour FSX. Le VC de PA est un VC FS9 et il est "FPS killer" dans FSX.
La seule solution serait de prendre pour l'instant le VC de Tom Ruth pour y greffer le panel, maisje dois demander son autorisation et cela representera beaucoup de travail, car toutes les coordonnées d'affichage des gauges sont différentes, donc pas mal de travail pour l'adaptation.
MAis je vais trouver une solution et le faire. (et il servirait aussi pour le A340)
Win 10pro - AMD 7800 X3D watercoolé - 64 Go - 2xSSD 2To - Nvidia 4070 TI Super - Ecran 34" WQHD
Hors ligne
Demain, je posterai plusieurs aéroports réalisé par divers membres et des mises à jours.
J'essaie aussi de terminé Honolulu (PHNL) qui est assez complexe et j'en profite pour mettre à jour le code du panel pour qu'il puisse gérer les approches LDA (Localizer deviated appraoch), puisque sur Honolulu, le localizer est bien présent dans l'aéroport par défaut contrairement à tokyo-RJTT
Donc le FMC définitif, saura identifié les approches LDA et caler la radio sur ces localizer.
POur les auteurs d'aéroports, il suffit de les déclarer comme une approche LOC, dans le fichier d'approche, c'est à dire par exemple :
"LDA-110.50" ainsi le FMC se calera sur le Localizer automatiquement.
Bien expliquer dans le fichier texte, que ce type d'approche se fait avec un localizer qui n'est pas dans l'axe de la piste, donc avec un virage brusque en final.
Je mettrsi à jour le manuel des aéroports pour ce cas de figure (assez rare il est vrai).
Donc si je poste PHNL demain, Il faudra pour le moment régler la radio NAV manuellement tant que l'avion définitif ne sera pas prêt.
François
Win 10pro - AMD 7800 X3D watercoolé - 64 Go - 2xSSD 2To - Nvidia 4070 TI Super - Ecran 34" WQHD
Hors ligne
Merci !
Je suis en train de faire un vol de test final sur PHNL, pour tester le nouveau code xml pour les approches LDA fonctionne.
Donc j'espère poster les aéroport avant ce soir.
Après je ne sais pas si je publie encore une énième beta du panel ou si vous êtes prêt à attendre la sortie de la version finale qui est d'un jours à l'autre.....
Par rapport à votre beta actuelle, les nouveauté sont :
Version final sur laquel je travaille encore et non publié :
=====================================
- Le cadre blanc du mode SPEED apparaissait, même si l'A/THR n'était pas activé : bug corrigé
- modification du code du GO-Around, quand le FMC est actif avec une approche de chargé : Désormais, lors de la remise des gaz, le controle de l'assiette de l'avion se fait en mode "Pitch" , controlé par le FMC, avec 15° d'angle, comme lors du décollage, au lieu d'une vitesse verticale pré-définie
- optimisation du code, pour diminuer les "évennement clavier" généré par le code, et donc moins gourmand en ressource CPU.
- Sécurité ajouté lors du décollage pour éviter de dépasser 16° d'angle initial de montée, même avec un CG reculé.
- Gestion des approches LDA (Localizer Deviated Approach)
Dernière modification par Fdd_fr (07/03/2015 15:21)
Win 10pro - AMD 7800 X3D watercoolé - 64 Go - 2xSSD 2To - Nvidia 4070 TI Super - Ecran 34" WQHD
Hors ligne
Premier test réussi, pour une approche LDA (ici PHNL Honolulu :

Le FMC sait désormais gérer les approches LDA. La fonction sera dans la version finale.
Win 10pro - AMD 7800 X3D watercoolé - 64 Go - 2xSSD 2To - Nvidia 4070 TI Super - Ecran 34" WQHD
Hors ligne
Oublie pas l'histoire des portes qui doivent pouvoir s'ouvrir sans hydraulique ! ;-) ce n'est pas fondamental, mais on en a parlé.
Sinon je voulais savoir : c'est quoi une approche LDA ?
Hors ligne
Et aussi j'en profite pour te féliciter à nouveau. Ton projet est magnifique ! J'espère voir ton FMC dans les prochains A330/340 !
Hors ligne
Bonjour,
Depuis quelques temps j'ai une anomalie au lancement d'un vol enregistré.
En effet, à l'ouverture de FSX, lorsque je lance un vol enregistré avec l'A520_FMC, j'ai un écran noir est le son. Je quille le vol par [Echap], puis je charge à nouveau le vol enregistré et je n'ai plus le problème.
Dans le passé, je n'avais pas ce problème!!
Je n'ai pas cette anomalie avec les avions de base de FSX ou des avions téléchargés.
J'ai :
- dés-installé l'avion,
- installé la version 0.77 de base : j'ai alors le problème,
- installé le panel 0.77q : j'ai le problème.Est-ce dû à l'avion ou à mon FSX?
Jean-Pierre
Bonsoir,
Si je suis le seul, cela provient probablement de mon FSX.
Jean-Pierre
Ma configuration : CM: MSI A88-XM-E35 FM2, CPU: AMD FM2 A4 5300 - 3.4 GHz, Mémoire : DDR3 - 8 Go, Carte graphique : nVidia GeForce 6500 - 1 Go, Windows 7 Familiale (64 bits)
"Seuls les avions mordent les fous!"
Hors ligne
Oublie pas l'histoire des portes qui doivent pouvoir s'ouvrir sans hydraulique ! ;-) ce n'est pas fondamental, mais on en a parlé.
Sinon je voulais savoir : c'est quoi une approche LDA ?
Bonsoir,
Ouvrir les portes sans hydrauliques : bizarre car les grandes portes sont probablement actionnées par des vérins donc besoin d'hydraulique.
Un spécialiste Airbus peut-il répondre.
Jean-Pierre
Ma configuration : CM: MSI A88-XM-E35 FM2, CPU: AMD FM2 A4 5300 - 3.4 GHz, Mémoire : DDR3 - 8 Go, Carte graphique : nVidia GeForce 6500 - 1 Go, Windows 7 Familiale (64 bits)
"Seuls les avions mordent les fous!"
Hors ligne
Je vais vérifier dans ma doc technique Airbus. Mais je pense que les portes des soutes sont éléctriques.
Mise à jour du site faite : [large]http://freenavdbgroup.com/?p=592[/large]
Nouveaux aéroports inclus :
- PHNL - Honolulu Hawaii
- LIPZ - Tessaro Marco polo Venise - Italie, réalisé par Georges.
D'autre part, les aéroports suivants ont été mis à jour :
- ENTO - Sanfjord Torp - Norvège, par Guillaume Massé : Amélioration des STAR et approches
- SKCL - ALFONSO BONILLA ARAGÓN - CALI - Colombie, réalisé par Carlos Mrio Diaz, qui est désormais fourni avec un AFCAD, car l'aéroport par défaut de FSX a un bug au niveau de la pente du Glide Slope de la piste 01
- LSGG - Genève Cointrin, réalisé par Jean-pierre Varnier, sur lequel Michel rapp à corrigé des petites erreurs dans le approches de l'IAF "SPR"
Voila, toujours en attente du mode d'emploi anglais pour publier l'avion...........
Merci pour votre collaboration au projet.
François
Win 10pro - AMD 7800 X3D watercoolé - 64 Go - 2xSSD 2To - Nvidia 4070 TI Super - Ecran 34" WQHD
Hors ligne
J'ai un gros problème avec SKCL.
Est ce que quelqu'un peut vérifier dans son FSX, en désactivant l'AFCAD qu'à réalisé Carlos Mario Diaz et qui est joint aux fichiers de SKCL, qu'elle altitude il a pour l'aéroport, avec l'AFCAD par défaut de FSX.
Est que vous avez 2425 ft ou 3263 ft ?
Win 10pro - AMD 7800 X3D watercoolé - 64 Go - 2xSSD 2To - Nvidia 4070 TI Super - Ecran 34" WQHD
Hors ligne
Bonjour François,
J'ai 2425 ft pour le Stock Airport.
Amicalement,
Michel
Hors ligne
Merci.
Bon, alors il y a un gros problème avec SKCL; N'essayer pas de l'utilisé avec le FMC, puisque l'aéroport de FSX à une erreur de 825 feet d'altitude !!!
Je vais essayé de trouver une solution, dès que j'aurais le temps
Win 10pro - AMD 7800 X3D watercoolé - 64 Go - 2xSSD 2To - Nvidia 4070 TI Super - Ecran 34" WQHD
Hors ligne
